Robots have become an increasingly indispensable part of our society. Robots can be classified in various ways, but in general, robots can be broadly divided into "industrial robots" and "service robots". Industrial robots are mainly used in factories to automate various tasks such as welding, processing, assembly, material handling, painting, etc., in place of humans (FA - Factory Automation). Industrial robots can be categorized into vertically articulated robots, horizontally articulated robots (SCARA robots), parallel link robots, and Cartesian robots, based on their structure and shape. In recent years, cooperative robots that are small, cooperate with humans, and can flexibly change tasks without the need for safety fences, as well as AMR (Autonomous Mobile Robot) and AGV (Automated Guided Vehicle) for unmanned transport within factories, have also come into common use.
On the other hand, service robot is a generic term for robots that provide assistance to people, and has been put to practical use in various fields such as medical care, nursing care, security, customer service, and rescue.
Service robots come in a variety of forms, not limited to humanoid robots, and drones are sometimes included in service robots.
As one of the main mechanical elements (transmission components), gears are used in robots, for example, as a component of speed reducers inside manipulators. There, the rotation of a servomotor (electric actuator) is slowed down using a speed reducer to amplify its output torque, making it possible to obtain a large force with a small motor. In the case of robots, planetary gear mechanisms, strain wave gearing, and cycloid reduction gears are employed as speed reducer types, and are used according to the application. Gears are also indispensable and important mechanical elements used in many other places besides speed reducers, where they are required to increase or decrease speed, amplify torque, change the direction of rotation, and so on. Gears used in robots are processed as needed, such as tooth surface grinding when high precision and quietness are required, and heat treatment when high strength is required.
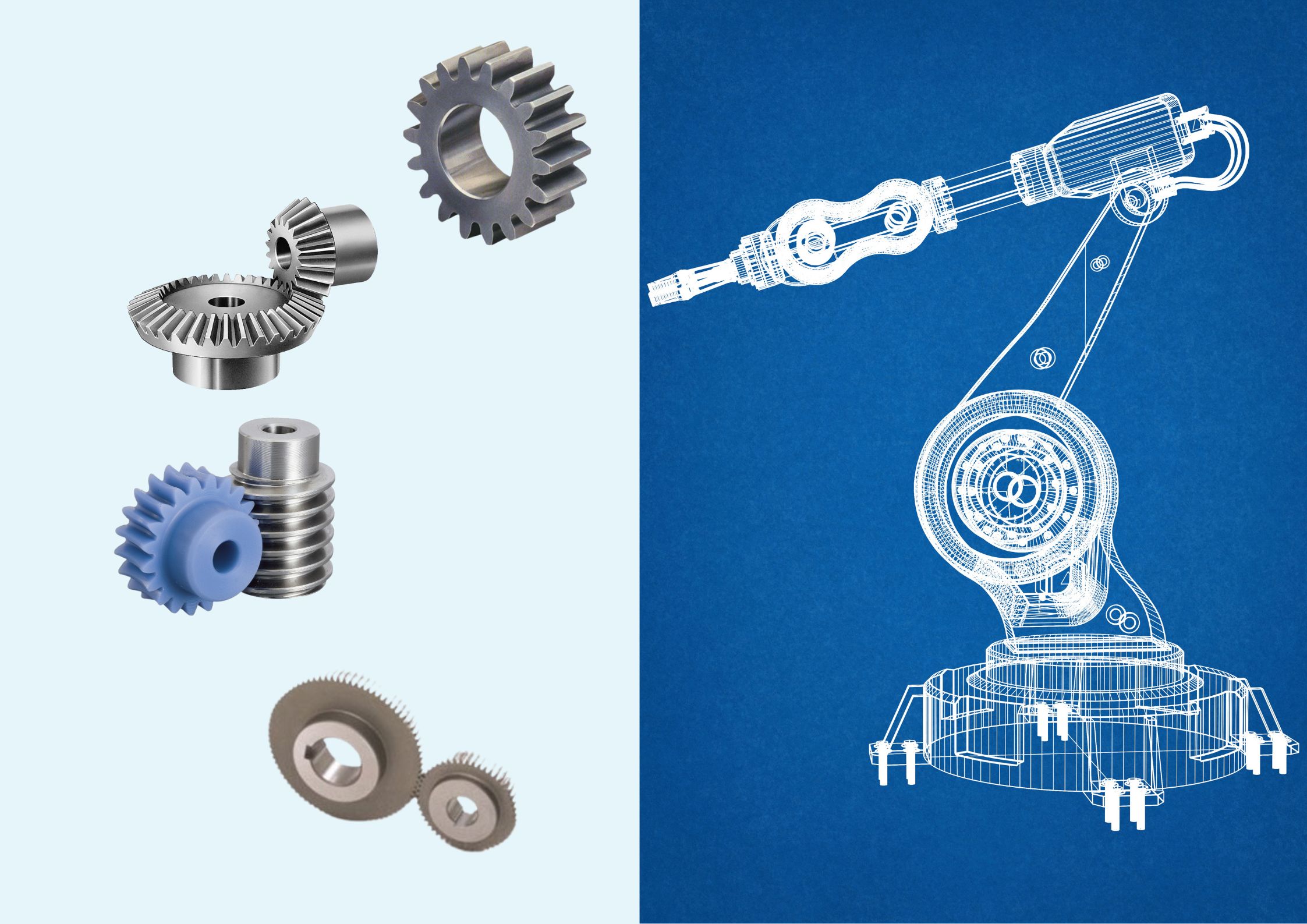
Spur gears with helical tooth flanks are called helical gears and are used when quietness and high strength are required. Spur and helical gears are used in various locations inside manipulators, such as in planetary gear mechanisms as mechanical elements used to transmit power in robots.
Rack and pinions, which convert rotational motion into linear motion, are used in a variety of applications, such as moving gantry robots and opening and closing robot hand grippers
Bevel gears are used to change the direction of power transmission inside a robot. A type of bevel gear is also called a "hypoid gear" whose axes are not orthogonal or parallel to each other.
Internal gears are ring-shaped gears with teeth cut inside the ring. In robots, internal gears are mainly used in planetary gear mechanisms together with spur gears.
Worm gears, which consist of a worm and worm wheel, are characterized by their ability to achieve a large reduction ratio in a small space and their self-locking function to which can prevent reverse rotation (depending on conditions). Worm gears are used in robots, for example, in the joints, in the opening and closing of robot hand grippers, and so on